Progress Update
Week 13-15:
- Solved the USB port issue by switching the user to the root
- Solved the lagging issue by separating the program into a detector and the main program
- Used UDP communication to connect two programs
- Sender: Face mask detector
- Receiver: Main program
- Calculated the driving control errors
- Used Espeak (a text-to-speech generator) as our audio assistant
- Filmed the demo video
- Did the project presentation
- Wrote the final project report
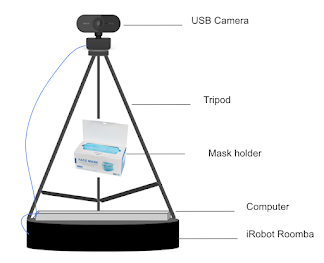
Final Product:

Project Demo
(If the video cannot be opened, here is the YouTube link: https://youtu.be/JRxGMKsTSpk)
Conclusion
- The robot is able to check if the passenger wear a mask or not
- The robot can move towards the passenger without a mask
- The robot can notify the passenger to take a mask
Future work
Use a closed-loop system for the driving control or let the robot move randomly
Use a smaller computer that can “sit” on the Roomba
Detector aborted because moving too fast or hit the camera
Improve the mask detector
Comments
Post a Comment